光看落落長的標題可能就會嚇到很多人(笑),不過這卻是個看起來很突破性、一點一滴扎實研究累積起來的大發明。
我會知道這個東西,起因是在一個禮拜前看到日經的報導:
SNS沸騰の「球状歯車」 全方向無制限駆動で人型ロボットに衝撃 | 日経クロステック(xTECH) (nikkei.com)
日經的這些專業技術報導,這幾年幾乎全部轉入付費機制(其實日本各大報都在走這條路,雖然說對於營收幫助可能有限,但總是要try try see),這一篇自然不例外,是要付費讀者才看得到全文的。不過僅看預覽的部分也能知道不少事情,所以先把其免費的部分介紹出來:
===
在社群網站上沸騰的「球狀齒輪」:全方向無限制驅動的能力將帶來人型機器人開發的重大影響
全方向無限制驅動齒輪---這個設計在2021年六月左右,在推特等社群網站上相當轟動。相關留言總計超過一萬次轉推,可見引起了多大的迴響,而這個設計其實是山形大學與東北大學的研究團隊開發出來的「球狀齒輪機構」(參見以下影片連結)。看到這個表面上設有許多凹凸形狀的球形齒輪可以全方向轉動(三軸旋轉自由度)的模樣,陸陸續續出現「這應該可以拿來做為人形機器人關節部使用」的評論言論。
之所以會出現這麼多迴響,是因為2021年6月舉行的國際展覽會「Japan Drone 2021」中,山形大學學術研究院機械系統工程主修準教授多田隈理一郎在會中演講的內容。而參加這個演講會的聽眾在推特上寫了關於這個球狀齒輪機構的發言,瞬間就讓大家知道了這個創新的存在。
這個消息在網路上受到的歡迎不僅限於日本國內,而是推廣到整個世界。開發者在YouTube上發表的解說影片立刻衝入了超過600則的留言,而且幾乎都是來自於英語系國家的觀看者。由於使用3D印表機而挑戰自己製作球形齒輪並且能到達使其動作的程度,網路簡直就是「熱到爆」的狀態了。開發者之一的多田隈理一郎先生說「(社群網站上的反應)很意外。我覺得那幾乎是和我們沒甚麼關係的世界,真是嚇了一跳」。
開發出這個由球形齒輪構成的制動器(Actuator,以下統稱為球面馬達)的,是多田隈理一郎先生與東北大學研究所資訊科學研究系強韌實體網路AI研究中心的副教授多田隈建二郎先生與該系的特任助教阿部一樹先生三人。由於其輸出軸與球形齒輪中心可以和三個方向的旋轉軸垂直相交,所以理論上完全沒有旋轉範圍的限制。這個球面馬達可以應用在機器人手臂的關節部分或無人遙控直升機用的防止相機晃動平衡環架機構(Gimbal)上。
過去,為了實現三個旋轉自由度的機構,而出現了各式各樣的研究方法。但根據東北大學阿部先生的說明,得知這次開發出來的球面馬達卻有著更加「小型、輕量、傳達動力效率高」的特色。
===
以下的付費部分,因為我不是日經的付費會員,自然就看不到了,但不難推想是介紹這個球面馬達(球形齒輪機構)的原理與設計細節。由於這是學術研究,文中又提到了這早在推特上炸翻了,所以就算不付費看接下來的內容,應該也很容易在股溝大神的指引下找到蛛絲馬跡。
果然,隨便一查,就看到了該研究團隊自己寫的設計內容簡報檔案:
https://shingi.jst.go.jp/var/rev0/0001/1317/2020_yamagata-u_3.pdf
這篇簡報的發表內容是去年(2020年)10月,他們剛拿到設計專利後(9月)整理出來,再根據股溝大神的搜尋結果得知,他們過去是從兩軸球形齒輪開始做研究,可見是「十年磨一劍」的累積結晶,並不是「橫空出世」冒出來的,光看到這點,就覺得很感動。
由於是開發人員自己寫的(排版上相當原始XD),保證原汁原味,所以接下來就直接引用他們的內容來介紹囉!
===
開宗明義就說球形齒輪機構在機器人與無人遙控直升機上有強大的應用需求。
而過去的球面馬達主要是以滑動摩擦的方式來作動,很不容易傳達動力(效率低)。
改用齒輪動作,就不需要用滑動摩擦這種非線性、難控制的接觸方式,而可以更確實精確地傳達動力。
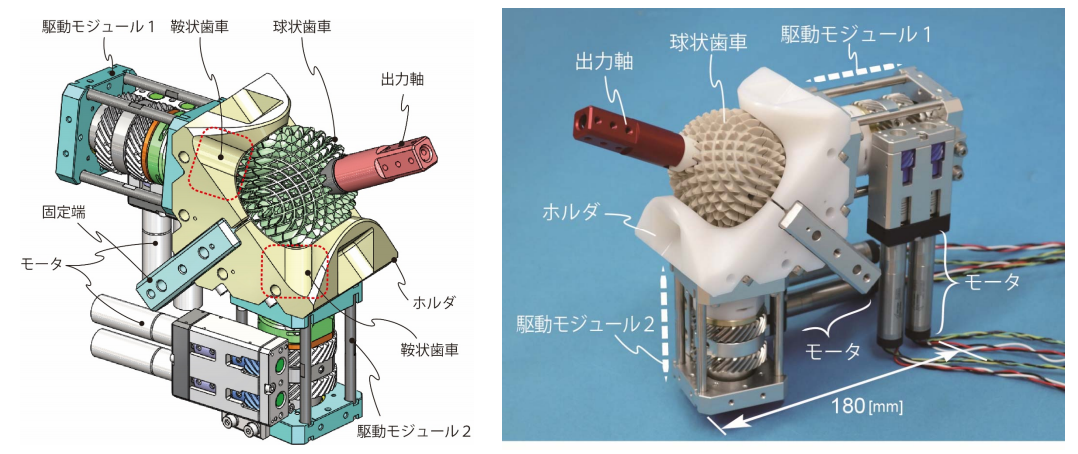
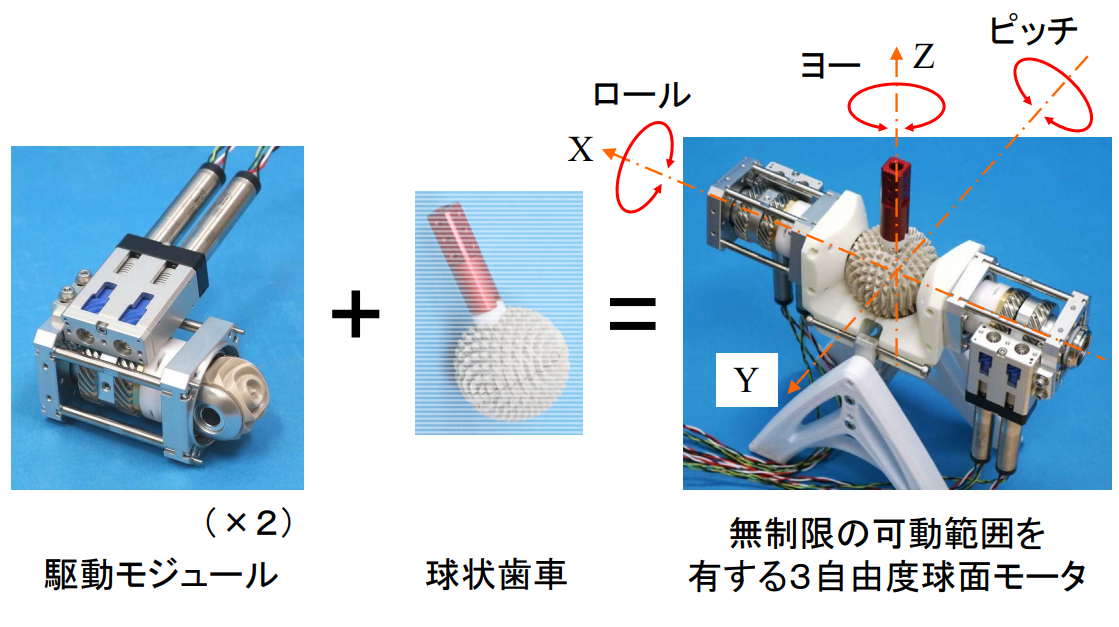
開發出來的機構示意圖與實際成品圖如下:
總計使用了四個馬達而達成了三個旋轉自由度的運動。
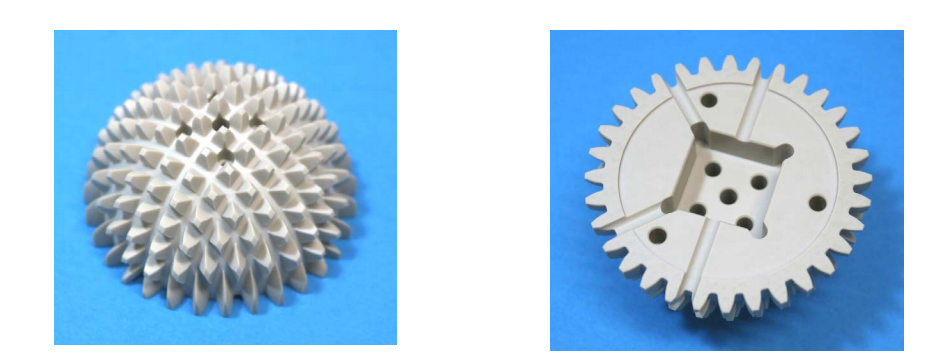
球形齒輪的構成原理如下圖。簡單來說就是將單擺線齒輪的平面輪廓,分別對X軸、Y軸各做一次旋轉掃出,即可得到很像高爾夫球的立體球形齒輪。
即便是使用3D列印,也很難一次將這樣的球體列印出來,因此實務上是做成兩個半球,再以螺絲對鎖組合起來。
除了半球體對鎖的螺絲孔以外,也預留了可以鎖付輸出軸的孔位,而可以像下圖這樣增加桿件動作。
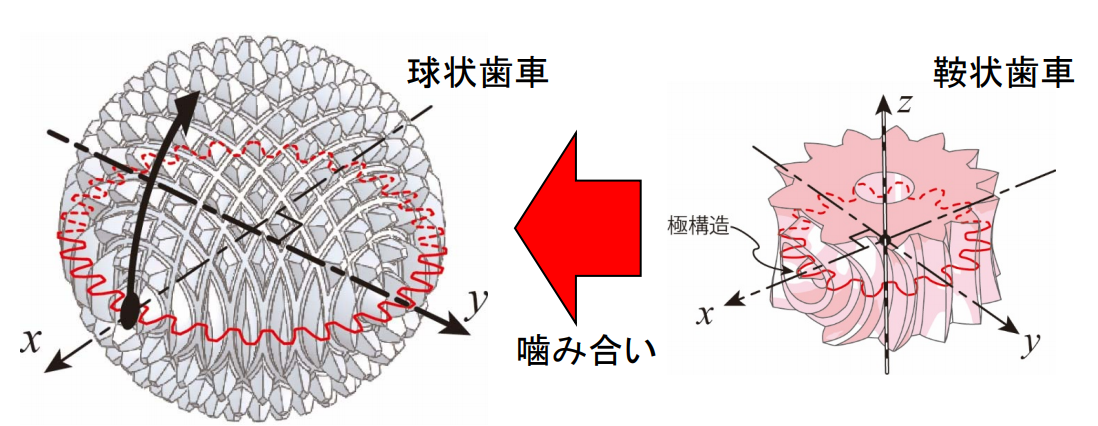
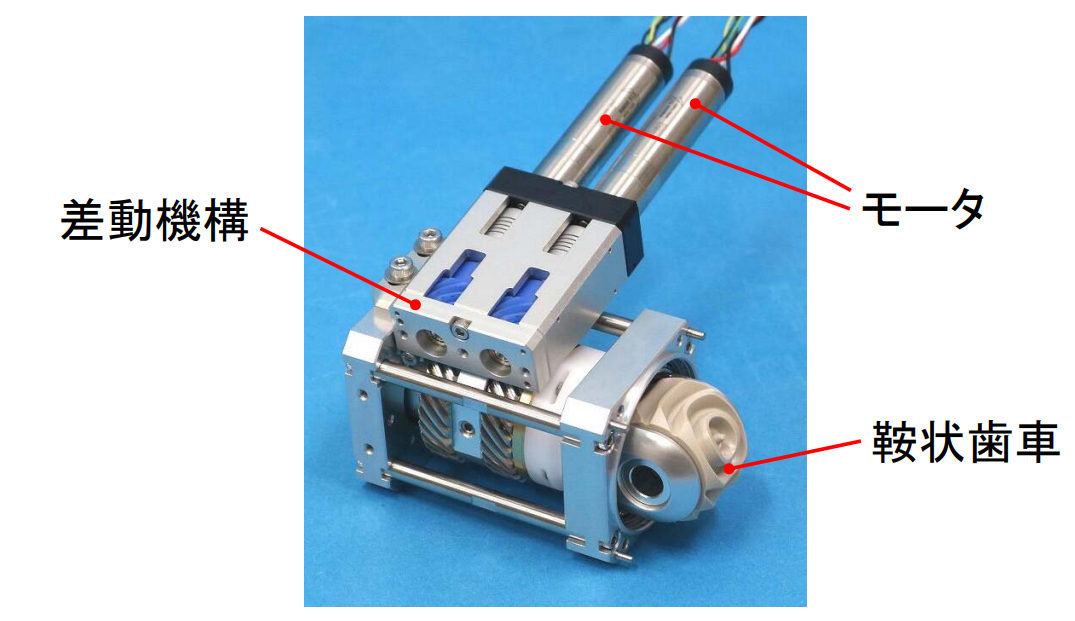
其對手件是個帶有特殊極性(有對應齒輪咬合的關聯性)構造的鞍狀齒輪。如此就可以搭配差動機構來對球心實施齒輪對齒輪的動力傳遞。
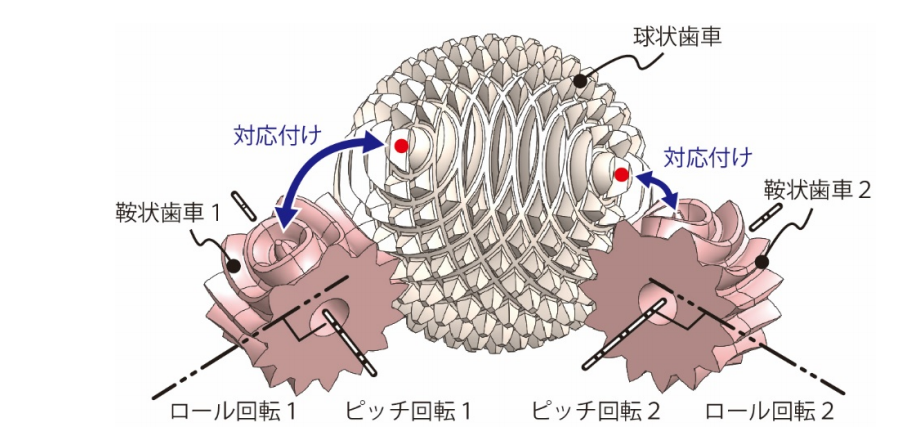
利用下圖這樣兩顆鞍狀齒輪的組合,就可以做出萬向旋轉機構。
再於每一個鞍狀齒輪後加上馬達與差動機構來驅動:
最後就構成了這個偉大的球面馬達:
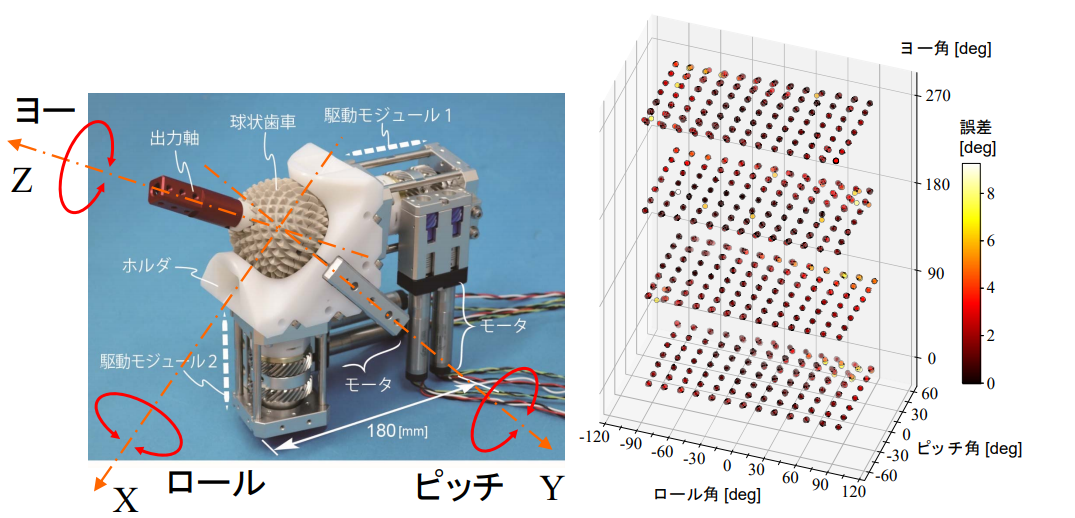
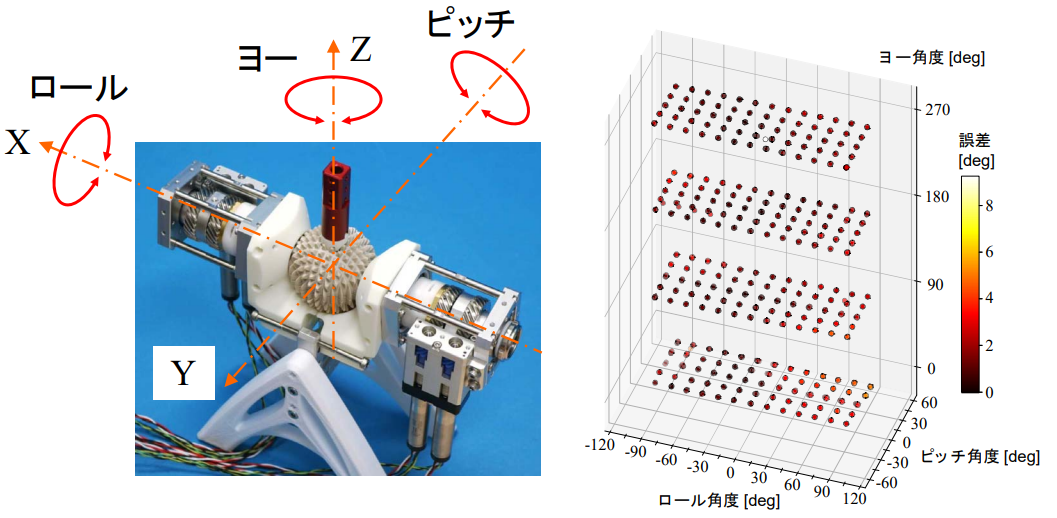
東西不是做出來看起來漂亮就沒事了,最重要的還是定量的控制精確度實驗。根據實驗來看,基本上各方向的旋轉精度可以控制在10度以內,雖然還有點粗,但對於實際應用來說還算可以接受。
當然,他們也做了上述影片中也有展示的機械人手臂操控驗證,的確很厲害。
他們也自己檢討了需要改進的方向:因為齒隙造成的控制誤差偏大、如何利用如3D印表機等更便宜的方法來進行大量生產。其實仔細想想,他們的齒輪是3D列印出來的,如果不是用太高檔的機器,齒形的精度、甚至整體尺寸的精度可能都是問題。而且兩個半球體的組裝看起來也沒有很確實的定位設計,僅靠螺絲對鎖就組裝起來,也會有頗大的組裝誤差。這些綜合考量起來,控制精度還有十度以內,根本就是超級厲害啊 XD
期盼企業合作:希望具有強大鑄造技術的業者來共同開發更有效率、便宜的製造球形齒輪方法。想要開發機器人或是相機防震的企業也歡迎一起來「摳拉剥」。



關於最後一點,應該是對萬代社與水果社的喊話吧?(笑)
生產上,的確技術非常困難。但日本非常多技術強大的模具公司,總有辦法找得到像下町火箭那樣的公司才對。
不過,如果水果社開發的外界未知新專案中有可以使用這個球形齒輪驅動機構的機會的話,就真的讓這個偉大的發明推廣出去了。
===
沒有留言:
張貼留言