譯自:Monoist
合體!變身!還能變形?!新開發的移動載具「Raptor」顛覆乘用物的概念
文:朴尚洙
千葉工業大學未來機器人技術研究中心(fuRo)與研究開發型企業RDS公司,兩者透過合作設立的ROIDZ TECH公司在2024年4月3日於東京召開記者會,發表其新開發之平台型移動載具「Raptor」。此產品的最大的特徵,就是具有整合了前二輪/後一輪之三輪構造以提供行走功能、稱為「基座單元(Basement Unit)」的下部模組;並且可以這個下部模組作為構造平台,然後和可以自由自在設計成各種外觀與不同用途、功能的上部模組「設計單元(Design Unit)」組合起來,實現出可做成包含自動搬運機器人在內等等不局限於乘用功能的各種移動載具。現在正在進行為了上市銷售的開發工作,快的話ROIDZ TECH公司可能會在2024年底前正式開賣。雖然賣價一開始設定為和高級機車同一水準,但為了普及推廣,也正在檢討低成本版本的可能性。目前也正在和不少外觀設計師與企業合作開發,目標是在開賣三年內能賣出100輛。
以下連結為記者會上Raptor實際行走的樣子,由於是前二輪後一輪的傾斜(Lean)構造,可以像二輪機車一樣傾斜旋轉:


Raptor這種移動載具的「行走功能」是整合進了「基座」之中;這個基座也相當於乘用平台中相當於平台(Platform)功能的心臟。而前2輪、後一輪的三輪構造,是由基座中的電池來驅動裝在後輪上的馬達,也算是一種小型電動車。
下圖為基座平台的實際模樣:

為了讓這個基座舉有高超的操縱性,因此使用了可以像二輪車一樣可以傾斜旋轉的傾斜(Lean)構造,可以在三輪接地的狀態下執行高速轉角(Cornering)或迴旋(Slalom)等高難度動作。另外透過搖動臂(Swing Arm)來連接底盤(Frame)與兩個前輪、一個後輪,而構成全輪獨立懸吊的傾斜懸吊系統,而讓整體底盤模組小型化。在這個小型華的底盤模組內,還裝有電池、驅動器、操縱軸(Steering Shaft)、可變式差動傾斜阻尼器(Damper)、可控制全部三輪的油壓煞車轉化器等等必要功能的元件。
下圖是傾斜機構傾斜時的狀態,途中手持麥可風的是設計師小西哲哉先生

至於能讓傾斜機構發揮重要功能的可變式差動傾斜阻尼器,可以將傾斜解度、阻力、速度調整到一定的範圍內。因此,這個設計就能配合使用者的喜好來調整車體的旋轉行為。傾斜角度可以調整的角度範圍是0~30度。
基座單元與稱為設計單元的上部模組之間的連接機構,是只要使用控制桿就能執行結合與分離的動作。控制基座單元的操作功能結構雖然是裝在設計單元端,但是傳達操縱或煞車動作命令的機構,在控制桿操作固定時,也能簡單和基座單元連接起來。另外,在記者會上展示的車體版本中,和電路系統相連的耦合連接器雖然是要和控制桿另外相連,但正式銷售版會調整成可以直接用控制桿就能讓耦合連接器結合起來。
下圖為基座單元上和設計單元相接的連接部,中央部分是操縱功能的連結埠,兩邊的圓形構造則是傳遞煞車指令的連結埠。

記者會上公開的設計單元與基座單元組合起來的車體外型尺寸為:長1190mm、寬510mm、高880mm,車輪軸距為850mm。基座單元的外型尺寸則是長1150mm、寬510mm、高440mm。重量則是設計單元加基座單元為54公斤,單獨基座單元38.3公斤,設計單元15.7公斤。
其行駛速度是時速0~40公里,巡航速度雖然是訂在時速30公里,但可以配合用途,藉由軟體來限制最大速度。在充滿電下的最大行駛距離為40公里。搭配的電池電壓為48V,充滿電約需要七小時。
四腳機器人可以變形成設計單元和基座單元組合
至於作為上部模組的設計單元,是預想成可以給各創意設計業者或服務業者獨自去開發設計。為了要將Raptor作為平台型移動載具產業來推廣,設計單元要如何和基座單元組合的規格,必須要簡單清楚傳遞給相關的外部企業是非常重要之事。此外,基座單元也會平行開發成可以單獨發售的產品,作為外部企業設計時的參考。
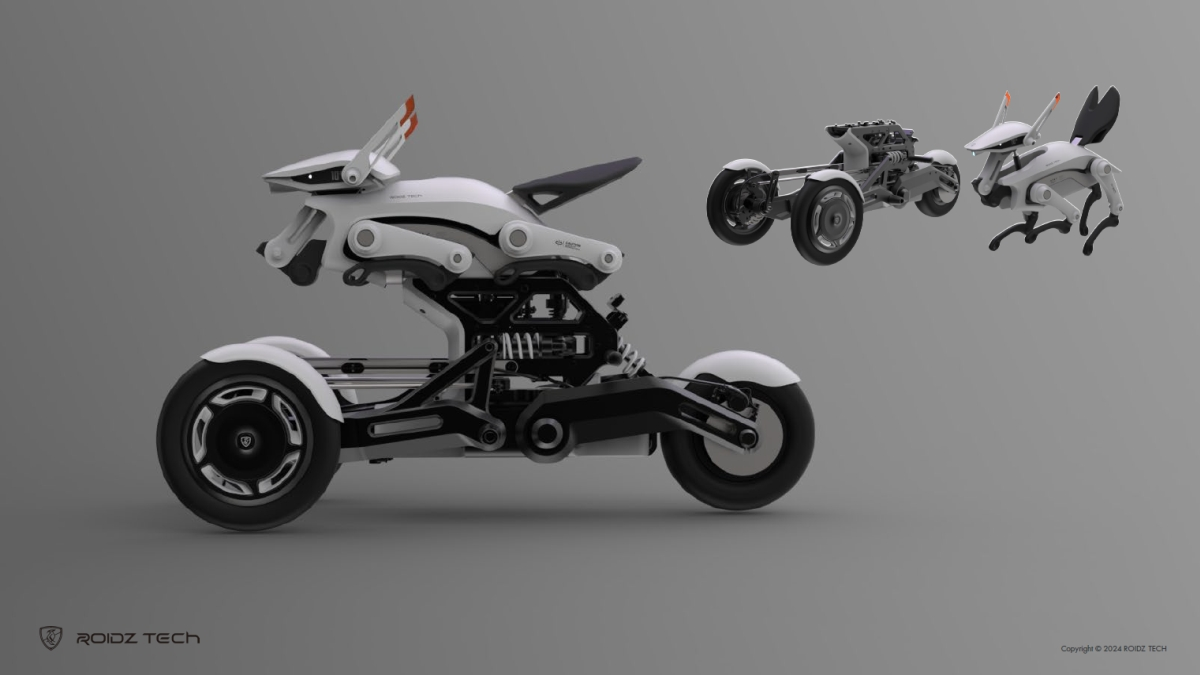
此外,推進Raptor產品銷售的ROIDZ TECH公司除了在記者會上公開的設計單元之外,其實還同步檢討了很多設計案。不僅是裝上方向盤的乘用載具這種一般性的設計專案,還有能讓人聯想到在一部分區域已經開始實用化的自動送貨機器人設計方案、以及四腳機器人變形成設計單元然後和基座單元組合起來的獨特設計專案。
下圖為ROIDZ TECH公開的各種設計單元類型,其中左側為自動送貨機器人,中央為四腳機器人變形的設計單元和基座單元組合後的樣子。

下圖則是四腳機器人變形組裝的概念圖
設計單元當然也可以搭載具有類似自動駕駛功能的感測器。從設計單元和基座單元組合成的車輛設計案來看,前面有個預留的大型空間,應該就是預留給這些感測器使用。
身為ROIDZ TECH與RDS兩家公司社長的杉原行里先生表示:「原本以賽車為主要開發方向並且累積了很多設計製造經驗的RDS公司,和具有先端機器人技術的fuRo合作開發全新的移動載具,從構想到這次的發表會為止,一共進行了三年。現在我們共同開發出了可以讓包含高齡者在內的全體人群自由移動與活動的基礎工具,希望能藉由Raptor更加提升大家對未來的期盼、興奮、向上提升的感覺」。
至於擔任ROIDZ TECH技術長的fuRo所長古田貴之先生說:「在2023年7月日本的道路交通法修正,讓電動滑板車也能在公共道路上行走之後,就有很多人期盼自行車或機車這種一人搭乘的交通工具的新方向。就在這個單人承載載具可以開始新發展的時間點上,ROIDZ展示出了新的開發方向,而終於造就了Raptor的開發」。
古田先生接著說:「基座單元是重視耐久性、安全性、操縱時的穩定性下設計出來的產物,我們盡力調整為就算是高齡者也能安心乘坐的版本,最終得到了這個可以幫助高齡者外出的工具。另一方面,我們也希望有人搭乘時會有興奮的感覺。因此這次在規劃設計單元時,才會想出一開始看起來像馬一樣的夥伴(四腳形機器人),實際上也能當作乘載物(變形後和基座單元組合起來)的產品」。
===
沒有留言:
張貼留言