譯自:PC Watch
即將成為先鋒公司事業核心、迎向自動駕駛時代的行使用空間
感測器「3D-LiDAR」樣品出貨說明會
預計單價100美元、大約一萬日圓,每年出貨量200萬~300萬顆,可
創造出數百億日圓的營業額
文:谷川潔 2018年10月10日
先鋒公司在2018年10月10日舉行了為自駕車開發的行駛空間感測器3D-LiDAR(以下
簡稱3D光達)的出貨說明會。這場說明會是配合該公司於2018年9月下旬開始出貨「3D光達
2018年版」樣品的時機而舉行的。會中除了說明3D光達2018年版四種機種的特徵之外,也
對未來光達事業的規模的預期加以說明。

先鋒公司開發的自駕車用行駛空間感測器3D光達

先鋒的光達樣品圖

光達偵測到的訊號圖

偵測到資料的圖例
說明會的開頭,是由先鋒公司的IR.公關部部長小松誠先生出來和媒體打招呼,他說:「3D光達
是自動駕駛技術中不可欠缺的元件。和地圖圖資事業一樣都具有本公司未來成長的驅動地位。」
產品本身則是由Smart & Autonomous Mobility事業開發部部長高木晴彥來詳細解說。他說先鋒公司除
了有Laser Disc或Bluray Disc光碟機等使用的高度半導體雷射技術與光學技術,也同時具有汽車音
響、汽車導航產品所需要的可靠度技術。
這次發表的3D光達,就是以這些光學技術、可靠度技術為基礎。至於可讓半導體雷射進行掃描的
MEMS Mirror機構,則是使用過去在Cyber Navi產品上的AR HUD光機的投影技術為基礎開發出來的。
2017年出貨的先鋒公司3D光達的初期版本中是直接使用AR HUD光機上的MEMS Mirror,作為
3D光達的原理驗證之用。而在2018年版光達中,則是使用新開發出來更加適合3D光達的廣角
MEMS Mirror。以此為核心,共製造出了可以長距離偵測的望遠型光達、中距離光達、與使用兩個中
距離光達組合而成的廣角光達、近距離廣角光達等四種機種的產品線。
先鋒公司的3D光達的特徵為做為光源的半導體雷射(LD)只有一個、作為接收回光訊號的光感測
器(PD)也只有一個,再加上MEMS Mirror構成了整體的架構。至今為止的代表性光達產品是使用
馬達來控制雷射光往圓周方向掃描,至於縱向方向上如果要獲得足夠的解析度,則必須根據解析精度
裝上很多的LD才行。
但是先鋒公司的3D光達,可以靠著MEMS Mirror來驅動一顆LD進行掃描來設定縱向的解析度,在
望遠式光達上實做出來的解析度則是76。這種掃描方式是稱為光柵式掃描,這次公開的樣品都屬於
光柵式掃描,但未來也預定會推出可以作圓周方向掃描的螺旋式掃描版本。
在未來的自駕車開發上,不難預測會裝有各種不同的感測器,但高木部長指出其中光達是最不可或缺
的感測器。好比說,雷達雖然可以偵測出哪裡有物體,但卻不容易算出正確的距離;而相機模組的
話,解析度雖然高,卻無法在暗處下捕捉到物體。相反的,如果有了光達,本來就開發出了可以量測
距離的工具,就算是在暗處也能正確計算出物體的距離。因此他的見解是需要將這些感測器組合在一
起使用會比較好。即便是光達本身,也可以將望遠型光達與廣角式光達組合起來靈活應用。

先鋒2018年版光達之規格

先鋒2019年版光達之規格

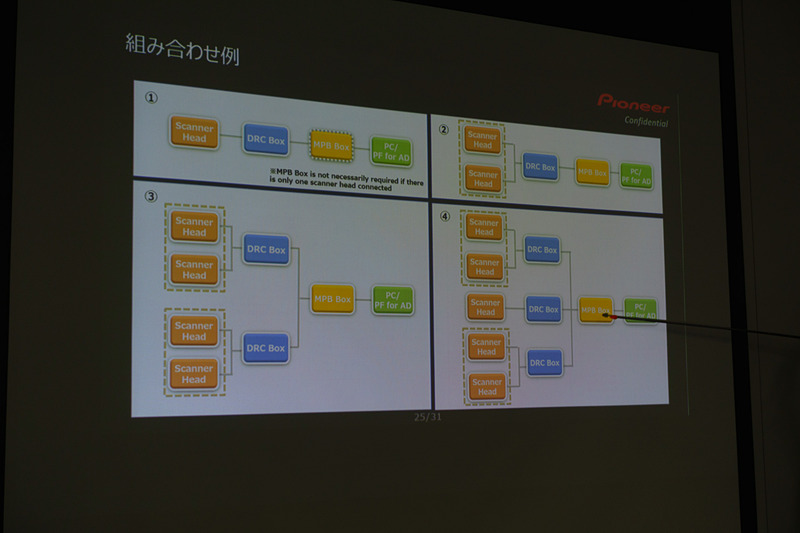
組合應用的範例
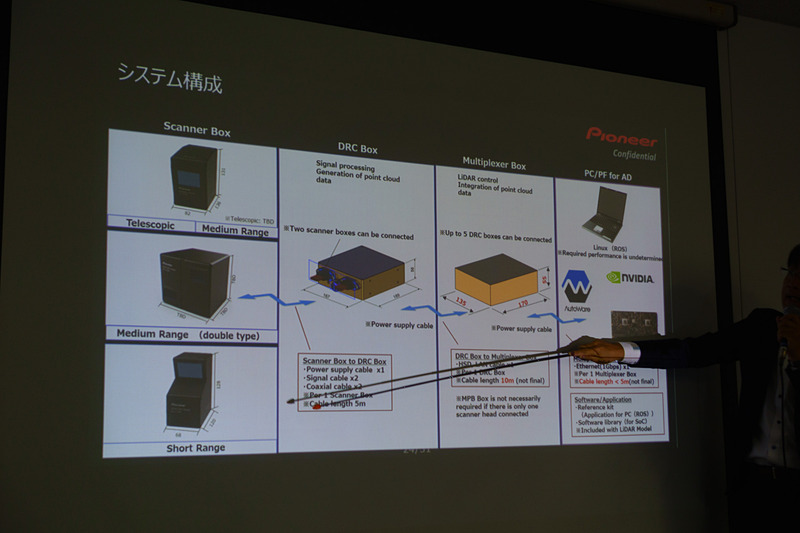
系統架構
關於組合的說明

先鋒光達的設計概念
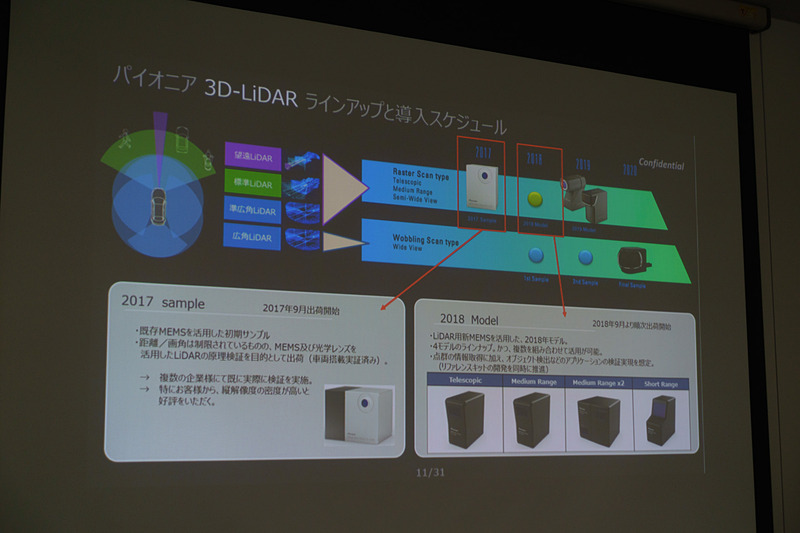
先鋒光達四種機種構成的產品線與導入日程圖
為此,這個產業必須的是光達的低價格化。高木部長說:先鋒的3D光達,因為僅具有一顆LD、接
受回光的元件也只有一顆PD、再加上MEMS Mirror而已,因此非常具有價格競爭力。和現在的馬達
驅動型光達相比,因為驅動部元件較少(僅靠著MEMS Mirror振動來改變光的啷方向),可靠度較
高、價格也會比較便宜。雖然市面上也同樣有採用MEMS Mirror的光達,但其接受回光的元件是使用
PD陣列,在原理上當然是只使用一顆PD的先鋒產品會比較有利。
此外,根據先鋒的說法,因為光源與受光器都只有一顆的先鋒光達對於光的干涉問題來說也是比較有
利的。未來搭載光達的車子一旦變多,不管甚麼車子都會從車上的光達上發出雷射光,所以廣角收光
的光達就可能會收到其他車子發出來的雷射光。當然,這可以靠軟體的方法來消除,但先鋒公司的光
達設計會出現這樣其他車輛光訊號混入的機率僅有7億分之一,這等於是天文等級般的微小。
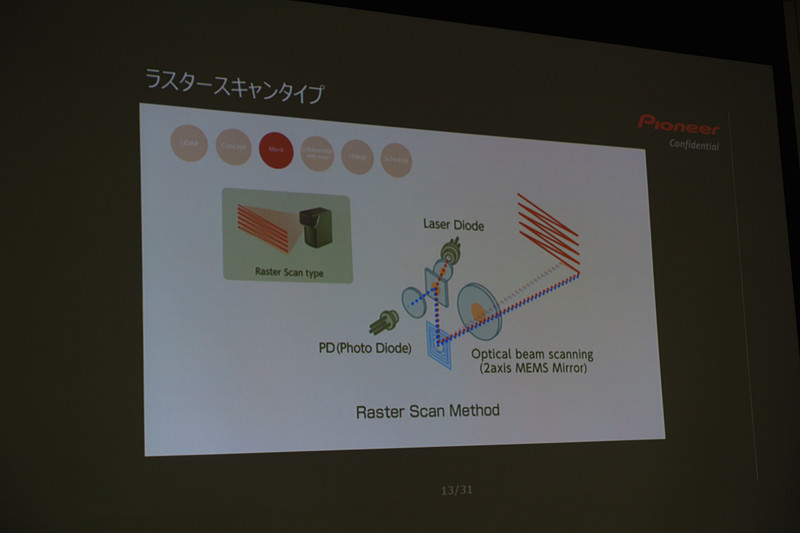
先鋒光柵式掃描光學設計架構

先鋒的螺旋式掃描架構
先鋒的光達目標價格為一顆一萬日圓,也就是相當於100美元的程度。為了達成這樣的目標價格,
年間必須要量產200萬~300萬顆。根據這樣的計算,將來預計一年的營業額可達數百億日圓。
先鋒2018年版的望遠式光達最大的量測距離為晴天時147公尺以上、陰天則是181公尺以
上。其Frame Rate為24FPS,這是配合當初試作版客戶反映資料量太多(計算不完)而作的調整。
LD是905nm的波長,這是因為這種波長可以符合眼睛安全規範的需求。
會中高木部長也談到了先鋒2019年版光達的規格。其2019年版的目標是希望望遠式光達能在
晴天下偵測到180公尺以上,現在也為了這項邁向未來的技術持續開發中。
此外,先鋒公司也準備了可以使用該公司光達的開發環境。他們提供了一個可以連接兩顆光達的DRC
BOX,而且還具備可以將這樣的DRC BOX三顆串接起來的MPB BOX,換句話說一個MPB BOX最多
可以控制六顆光達。MPB BOX所偵測到的資料又可以再輸入到類似NVIDIA DRIVE PX2這樣的自駕車
專用電腦中進行運算。先鋒公司可以提供NVIDIA DRIVE PX2用開發環境的3D光達資料,因此汽車製
造業客戶就可以直接搭載許多顆先鋒公司的3D光達到車上,簡單快速的開發自動駕駛汽車,這也是
該公司主打的賣點之一。
高木部長對於未來的展望,提到該公司也會考慮3D光達與地圖資料融合的開發。先鋒公司本身就有
地圖圖資公司Increment P,而Increment P公司本身則是加入了OneMap Alliance聯盟。聯盟之中又有
Here這樣的成員,因此能夠整出一個全球性水準的高精度地圖圖資。如果能將這樣的圖資和光達整合
在一起,就能定位出自己的車輛位置,甚至能夠提供出可能性(Likelihood)資料。換句話說,汽車製
造商客戶可以根據這樣的融合更容易開發出正確行動的自駕車。
根據先鋒公司的實驗結果,目前要能定位出自己車輛位置的話,至少需要四顆3D光達,但這樣的配
備有點太過豪華昂貴,所以未來或許只在車前端裝一顆光達、後端裝一顆光達,然後可據地圖融合來
提供定位與可能性資料。
先鋒公司希望這樣能夠和地圖圖資融合起來的3D光達、或者是說能夠提供可能性資料的3D光達可
以在2019年初就能公開展示。當記者詢問「意思是2019年的CES秀展就能看到嗎?」時,
他們表示的確是以此為目標來加緊開發的。
===
沒有留言:
張貼留言