[譯者序]:就在IFA展示晚後一天,重視日本市場的呆森大人立刻飛去日本又開了一場展示會。國內的媒體基本上就是發漏IFA的新聞,因此我想來抄一下他們在東京會場的消息。
===
大熱門終於登場?!戴森提倡、具有「人眼(Eye)」的掃地機器人
呆森公司向世界同時發表了渦旋式(Cyclone)吸塵的掃地機器人,並且特別在日本舉行了媒體說明會。創立戴森公司的詹姆士.戴森先生親自上場宣傳這個新產品的特點與優異性能。
[報導:八木澤篤/MONOist]

戴森公司在2014年9月4日,向世界同時發表了渦漩式掃地機器人「戴森 360 Eye 掃地機器人」(以下簡稱戴森360 Eye),並且在日本舉行了媒體說明會。預計會在2015年春上市,並且是在日本首發。但在現階段仍未發表日本售價為多少錢。
在說明上登場的戴森公司創立人詹姆士.戴森先生對媒體說明:「戴森360Eye花了十六年的歲月來進行開發研究,因此可以確實地清除垃圾,並且是實現了比其他掃地機器人更強大吸塵力的智慧型掃地機器人」。

手持「戴森 360 Eye」的詹姆士.戴森先生
戴森360Eye使用了獨自開發的「360度視覺系統(Vision System)」,可以掃描出房間內的全方位狀況,並且掌握出目前正在房間的哪個位置吸塵、到剛才為止吸過了哪些區域、以及還有哪些尚未吸乾淨的地方。就是由這個視覺辨識系統與該公司獨自開發出來的高效率使用電力的高轉速數位馬達、渦漩吸塵技術等實現了不需要煩勞人手的高性能掃地機器人。
至於本體顏色,則是準備了「鎳灰/藍」與「鎳灰/紫紅」兩種。本體的尺寸大約是120×242×230mm,重量約是2.4kg 。特別是比較小巧的外型尺寸,可使其能夠鑽入目前市面上的掃地機器人難以通過的椅子腳間等狹小區域。此外本體上也沒有一般掃地機器人所搭載的側刷(譯註:其實這應該是在閃愛蘿蔔社的專利),而只有幾乎與本體同寬的主刷。戴森先生說:「以往的側刷,只是反而將灰塵垃圾等打散掉而已(譯註:這要側刷的數量、與主刷的搭配轉速、與位置而定,不能一概論之),還不如像戴森360Eye那樣裝上幾乎塞滿本體寬度的主刷與強大的吸塵力才能將機器人通過的區更確實地掃乾淨」。本體中內建了鋰離子式充電電池,有效工作時間約20~30分鐘(譯註:遠低於其他掃地機器人的工作時間,可見其高轉速馬達畢竟還是相當吃電)。可以透過專用充電埠來進行充電(充電時間約120分鐘---譯註:未說明是否具有快充設計)。在感測器上,則是裝有兩個紅外線感測器、陀螺儀、高低差感測器等合計22個感測器。順便一提,這個有效工作時間是會受到房間內的家具配置複雜程度所左右的。
(譯註:其實在記者會現場,也有不少記者發問少了側刷後,是否可能會出現比較小的角落清不乾淨的問題。戴森的回答是,大部分的細微角落應該都可以清到,但的確有些尖細的三角形區可能會無法掃到)

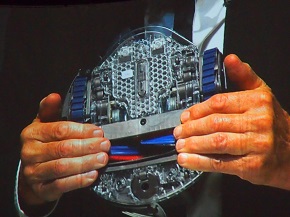
(上)「戴森360Eye」的半剖模型/(下)由碳纖維與尼龍所組合而成的主掃刷
在媒體說明會上,為了讓大家看到這台新機器人和其他家掃地機器人的吸力差距,還做了表演來展示戴森360Eye的優異性能。戴森先生說:「伴隨著壓倒性的強大吸力與特別意識日本市場需求而採用的碳纖維與尼龍所組合而成的主刷,甚至可以將地板溝槽中的灰塵都能清出來」,特別強調只有吸塵過一次,就可以讓地板非常乾淨的特點。
 於他牌的掃地機器人(後方)比較吸塵能力的展示實況
於他牌的掃地機器人(後方)比較吸塵能力的展示實況與他牌的掃地機器人相比的差異所在
戴森360Eye和該公司的吸塵器一樣,是將強大的吸塵力當作其特徵之一。過去其他公司的掃地機器人大部分都為了不要消耗太多電池電力,而常常使用輸出功率較低、效率比較差的馬達(譯註:輸出功率低,不見得效率差;相反地輸出功率高,也可能會是效率差;還是要看設計者如何設定操作點)。對此,戴森360Eye採用了每分鐘最大可達78000轉的「戴森數位馬達 V2(DDM V2)」,並且利用了將灰塵與空氣分離的「放射管渦漩技術(Radial Root Cyclone Technology)」,可將0.5微米大小的纖細灰塵確實地吸起來,等於是將吸塵器上累積起來的各種功夫確實地傳到戴森360Eye身上繼承起來。

戴森數位馬達 V2
此外,對於掃地機器人而言是一大技術課題的漏掃問題,則是使用了獨自開發的360度視覺系統來發揮威力。以往的掃地機器人,大多是使用隨機行動來掌握住房間全體狀況的逼近方法,然而戴森360Eye卻是靠著這個360度視覺系統來掃瞄出房間內的全方位狀況,並且掌握住房間的形狀與障礙物的位置。因此可以一面認識出標記出來的位置而明白自己位於何處,還可以做出房間全體的地圖,不會去重掃已經掃過的區域,而達成最有效率的吸塵方式(譯註:以其消耗電力而已,如果不這樣做的話,工作時間會更短,而不實用)。在其本體上方,內建有和紅外線感測器連動的全方位廣角相機,再使用複雜的數學計算與機率理論、幾何學、三角量測法來實現可以確實進行狀況判斷的行動方式。
(譯註:韓式---如三星、LG的掃地機器人早在2009年左右就開始搭載辨認房間形狀的相機,而且也在IFA上展出過,並且也有相關方面的不少專利,呆森社不會不知道才對。因此,呆森社要怎麼避過這些專利也是很值得探討的有趣地方)

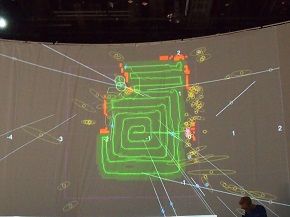
(上)照片右側的半球部分就是全方位廣角相機/(下)基本上它的設計是採用四角螺旋式行進的方式
戴森先生說:「基本上它就是像在畫四角螺旋形來行進,然後會一面避開障礙物一面往還未清掃過的地方移動,因此可以從一個房間開始清掃,然後依序掃除數個房間」。此外,在清掃途中如果發生電力不足的現象(譯註:看起來很有可能發生)時,可以先回去充電埠充電(譯註:如果沒有快充的話,可是要兩個小時喔),然後再從中途暫停的地方開始重新清掃。
除了以上這些特徵外,和它牌掃地機器人的不同之處,就是採用了「皮帶(履帶)式驅動轉輪」的特點(譯註:先不論好壞,我倒是對這一點構想相當佩服)。過去的掃地機器人大多是採用車輪式的設計,因此行走性就低(譯註:是說家中又不是戰場XD),稍微有些高低斷差,可能就會跨不過去而在途中停下,而偏離了原定行走的規劃路程。對此,戴森先生說:「戴森360Eye使用了皮帶驅動是轉輪,克服高低差的能力很強,完全不需要擔心它會在地毯與地板的交會處掛掉、或者是滑掉而走去奇怪的方向上」。(譯註:這點真的是完全原創,了不起)

皮帶式驅動式轉輪
甚至在附屬功能上,戴森360Eye也實現了和智慧型手機同步的功能(譯註:這在依些韓系或日系公司的掃地機器人上也有類似的功能)。這個稱為「Dyson Link」的免費專用App(分別有iOS/Android版本),可以進行吸塵的定時預約、也可以從外出處確認吸塵的進行狀況或它是走怎樣的路徑來清潔的紀錄。此外,產品的說明手冊、故障解決說明,也可以藉由戴森360Eye的軟體更新來執行。
沒有留言:
張貼留言