===
前去機器人產業最前線的愛蘿蔔美國總公司來採訪研究開發現場
說到機器人,大家就會想到組裝線上所使用的機器手臂、或是做為企業宣傳而會跳舞的那種機器人,但顛覆這種印象的,就是開發、銷售能進入從家庭到戰場等人類會活動的場所執行作業的機器人的愛蘿蔔社(iRobot)。這次我們就要去到這家公司的辦公室採訪,而且因為可以拍攝開發中的試作機器人,所以就試著來做個詳盡的報導。
愛蘿蔔社官網:
愛蘿蔔社的總公司位於麻塞諸塞州的貝德福德鎮。
在該公司前,就只有一條大馬路通過,此外甚麼都沒有。從最接近的大城市波士頓開車到這裡也要30分鐘以上,等於是將總公司蓋在郊區。

該公司的辦公建築物大致像下圖這樣的感覺。

受到朝陽閃耀的辦公大樓。

屋頂掛有寫著「iRobot」的招牌。

接著走向大門口。

接下來到了櫃檯。由於該公司是有在做軍事用機器人的企業,所以在櫃檯會進行嚴格的安檢,在進行採訪時還得拿出護照來申請。

這次配合我們採訪的是在愛蘿蔔社的研究開發小組中擔任老大(Director)的克里斯.瓊斯(Chris Jones)博士。

瓊斯博士現在主要是進行使機器人適應人類生活環境的研究,因此正在開發即使機器人的手臂柔軟化而使其打到人也不會受傷、以攝影鏡頭來辨識周圍事務的技術。這次我們拍了與這些計畫相關的一部分實際機器的照片。不過,有不少機器人是與DARPA(美國國防高等研究計畫局)簽約的計畫有關,所以禁止外人拍照,我們就貼出愛蘿蔔社自己拍攝好上傳至你家水管(Youtube)的宣傳片來代替。
◆空氣手臂(AIR ARM)
以下這是現在開發中的新技術:充氣膨脹的機器手臂。


試著摸摸看的話會發現它有像橡膠小艇那樣的觸感,可說是在握著甚麼東西時具有相當的強度、萬一撞到人時也不至於發生大傷害的絕妙軟硬度。

這個手爪部分可以夾持各種東西來搬運。

實際上將之充氣膨脹並且拿著寶特瓶運送的樣子、或是拉著工具箱的樣子,都可以在以下的影像中看到:
此外還有全身構造與空氣手臂相同的蜘蛛型機器人的試作機。


握緊其腳的部分時,就會軟軟地被壓扁。

像這種裝有空氣手臂的機器人,不僅有撞到人也不會受傷的安全性,還有比起金屬製的零件可用更低成本的方式進行量產、容易大型化等優點。理論上,如果將能收藏至卡車載貨台大小的機器人充氣起來的話,甚至可以到達大型卡車那樣大的尺寸來工作。
此外,在不太需要講究強度的狀況下,在關節處追加拉鍊就能簡單的調整長度了。


◆萬用夾具(Universal Gripper)
在橡膠製的袋子中塞入類似泡棉類的材質、然後抽出空氣使其可以拿起任何形狀東西的機器人手臂,就稱為萬用夾具(Universal Gripper)。

下圖照片的左側就是抽出空氣的幫浦部分,而右側就是其手臂部分。
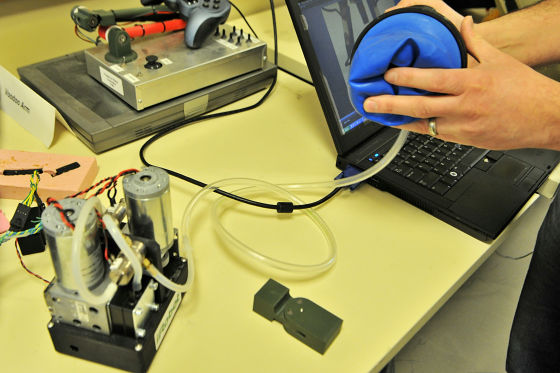
只要將這個萬用夾具緊緊按在想要拿起的物品上,然後在抽成真空下,這個手臂就像是包住物品一樣夾起該物品。


而這個實際握緊門把打開門的樣子也可以從以下的影片中看到:
此外應用同樣架構使其可一下膨脹、一下收縮來轉動行進的機器人,也可在以下的影片中看到示範動作:
◆柔軟的機器人手臂
一般來說,機器人手臂幾乎都是用金屬或塑膠等堅硬材質做成的,但在功率比較大的機械上使用,在握著甚麼東西之時,就算只偏移個1釐米,就可能使被握持的東西或是地板、桌面受傷。此外,如果施加更大的力時,甚至機器人本體都發生損壞的可能性也非常高。
因此,他們就進行了改用橡膠來製作機器人手臂使其兼具強度與柔軟度、就不會傷害周圍的事物或自身的研究。在以下的示範影片中,就可以看到以球棒去連續敲擊這種機器人手臂拿著的棒球卻不會被打壞的樣子:
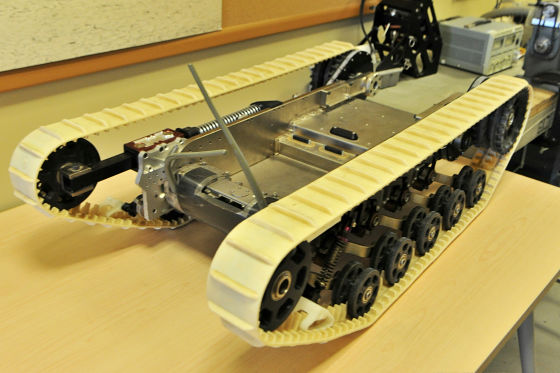
◆為了能在荒地上跑的新型履帶之開發
在凹凹凸凸的地面或是充滿瓦礫碎石的場所中行走的機器人往往會裝配履帶,但由於往往不完善的懸吊系統,往往會反轉或反彈,很難以穩定的速度前進。因此他們正在開發的,就是如下圖所示,內建有懸吊系統的小型履帶機構。

其中大的轉輪是傳遞動力、小的轉輪則是充當懸吊功能的作用。

像這樣的構造,在具有強力內燃機或具備金屬履帶的大型戰車或建築用車輛上是非常普遍的設計,但對於容易被小石頭卡住履帶或造成履帶脫落的小型機器人來說卻很難應用上去。
從前方來看這個測試用的履帶機構,大致是這種感覺。
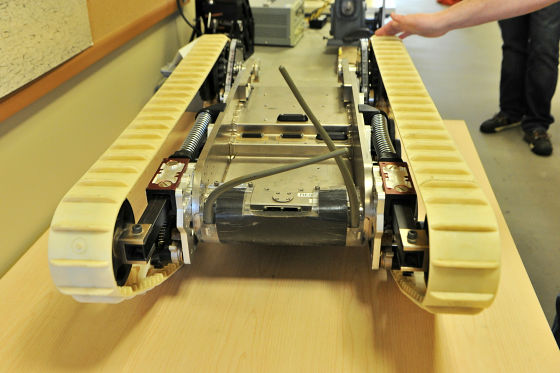
用手去壓履帶時,就知道懸吊系統有跟著縮下去。

實際在荒地上、石礫上行走時速度不會降低而順利走完的樣子,可以在以下的影片中看到:
◆人工智慧的研究
愛蘿蔔社將人類與人類間的溝通方式作為樣本使機器人也能用同樣方式進行溝通當作該公司的目標,因此有必要先使機器人能夠像人類一樣辨識周圍的環境,而正在進行利用相機捕捉各式各樣物體來判別各是甚麼東西的技術開發。
對人來說,只要叫他「打掃這台車的另一邊」,不管這台車是黑是白、是大是小、或者是有點奇怪的形狀,他都可以辨認出這是一台車;但其實這對機器人來說,卻是個相當難的問題。只要在車前站了人、或是看的方向不一樣,機器人就可能辨認不出來,而無法像人類那樣掌握各種不同物體的屬性。而在以下的影片中,就拍攝了為了突破這樣的障礙而進行的實驗成果。影片中將旋轉的平台上放上車子或馬的模型,並且從所有角度來讓電腦學習其形狀,進而辨識出馬與騎著馬的人的差別:
就是這樣,雖然在日本講到愛蘿蔔公司,想到的最大印象就是掃地機器人「倫巴(Roomba)」,但實際上他們的總公司卻是開發著從軍是用到家庭用等各種廣大用途的產品,進行著從機器手臂、到履帶、人工智慧等各式各樣的研究。
===
相關系列文章:
沒有留言:
張貼留言